Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Implemented reinforcement learning (RL) techniques including Proximal Policy Optimization (PPO) and Adversarial Imitation Learning to train humanoid robots in tasks such as walking, jumping, and kicking, resulting in improved stability, accuracy, and performance.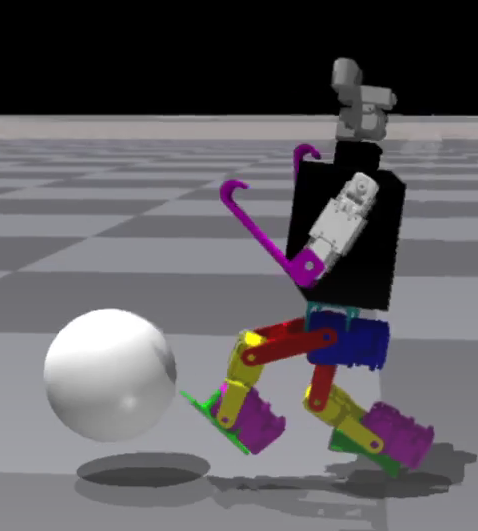
Designed and developed a cutting-edge drone for nuclear safety inspections. Equipped with CV object detection (YoloV5), the drone can read critical data from radiated zones, while its visual SLAM enables accurate localization, RRT* allows for obstacle-free path planning and precise way-point motion planning for navigation through these zones.
The Unscented Kalman filter uses odometry and computer vision to calculate an optimal estimate of the robot’s location and navigate accurately to the destination, with tuning of the covariance parameters based on keeping the ground truth within the 1 sigma bound.
Developed a computer vision software using Python, yolov5, and ROS for object detection.
Developed a computer vision software using Python, OpenCV, and ROS for soccer field line detection. Utilizes a point cloud approach for improved accuracy, with 2D points transformed to 3D points in the robot’s frame of reference, allowing for definition of field lines with known thickness.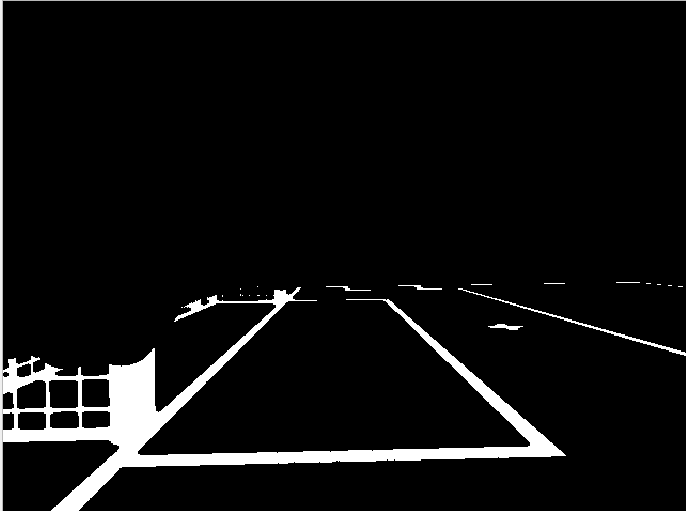
Developed Various Components necessary for a self driving car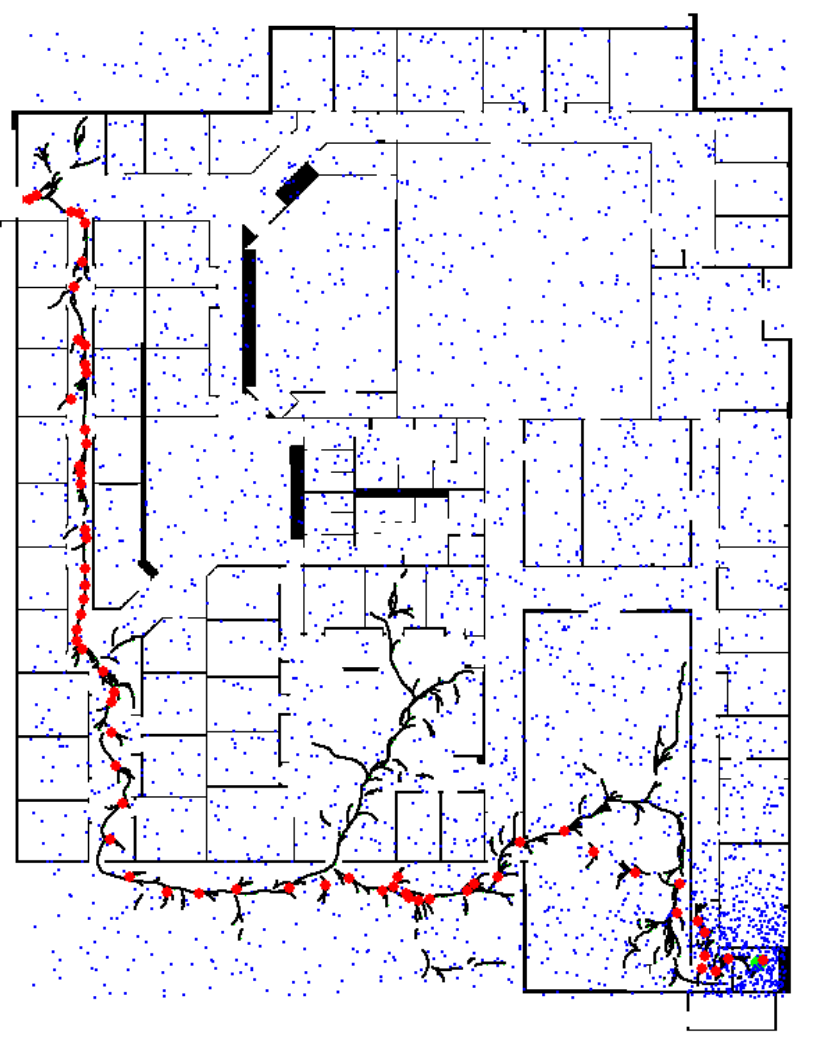
Developed a convolutional neural network for classifying musical notes from spectrogram images with 90% accuracy.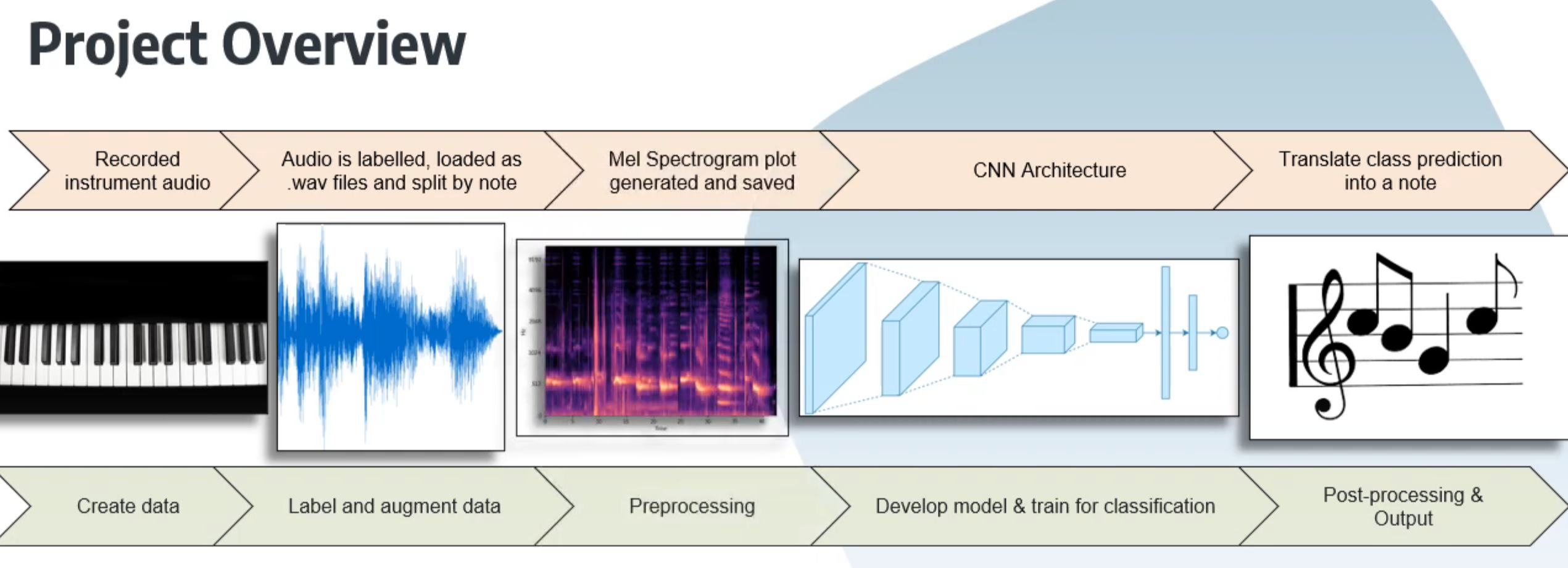
Designed and created an innovative autonomous flower pot that uses computer vision and environmental sensors to track and move toward optimal sunlight and water locations.
Programmed an android app using IBM Watson API to deliver a satisfying user experience for connecting top applicants with top companies.
Programmed an android app using IBM Watson API to deliver a satisfying user experience for connecting top applicants with top companies.
FRC 2017 Robotics competition.
Published in Climate Change with Machine Learning workshop at 35th Conference on Neural Information Processing Systems (NeurIPS2021-CCAI), 2021
Climate change continues to be a pressing issue that currently affects society at-large. It is important that we as a society, including the Computer Vision (CV) community take steps to limit our impact on the environment. In this paper, we (a) analyze the effect of diminishing returns on CV methods, and (b) propose a \textit{``NoFADE’}: a novel entropy-based metric to quantify model–dataset–complexity relationships. We show that some CV tasks are reaching saturation, while others are almost fully saturated. In this light, NoFADE allows the CV community to compare models and datasets on a similar basis, establishing an agnostic platform.
Recommended citation: Andre Fu, Justin Tran, Andy Xie, Jonathan Spraggett, Elisa Ding, Chang-Won Lee, Kanav Singla, Mahdi S. Hosseini, Konstantinos N. Plataniotis. (2021). "NoFADE: Analyzing Diminishing Returns on CO2 Investment." Climate Change with Machine Learning workshop at 35th Conference on Neural Information Processing Systems (NeurIPS2021-CCAI). 1(1). [https://arxiv.org/abs/2111.14059](https://arxiv.org/abs/2111.14059)
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.