ROB521 Labs (2023)
Lab 2
Develop code for a turtle bot for a high level planner using RRT* and a low level planner using trajectory rollout
RRT* Generation
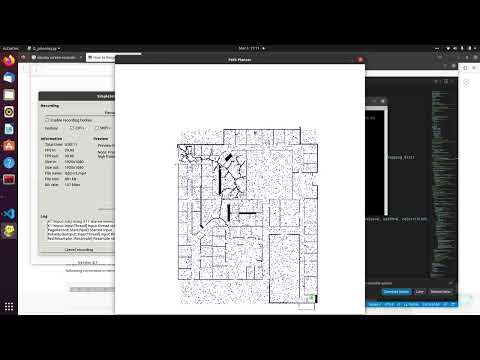
Trajectory Rollout on RRT* Path on Office Map

Lab 3
Develop code for a turtle bot to estimate odometry from encoders and create an occupancy map from a lidar
Occupancy Mapping Generation