Reinforcement Learning for Soccer Skills Research Thesis (2022-2023)
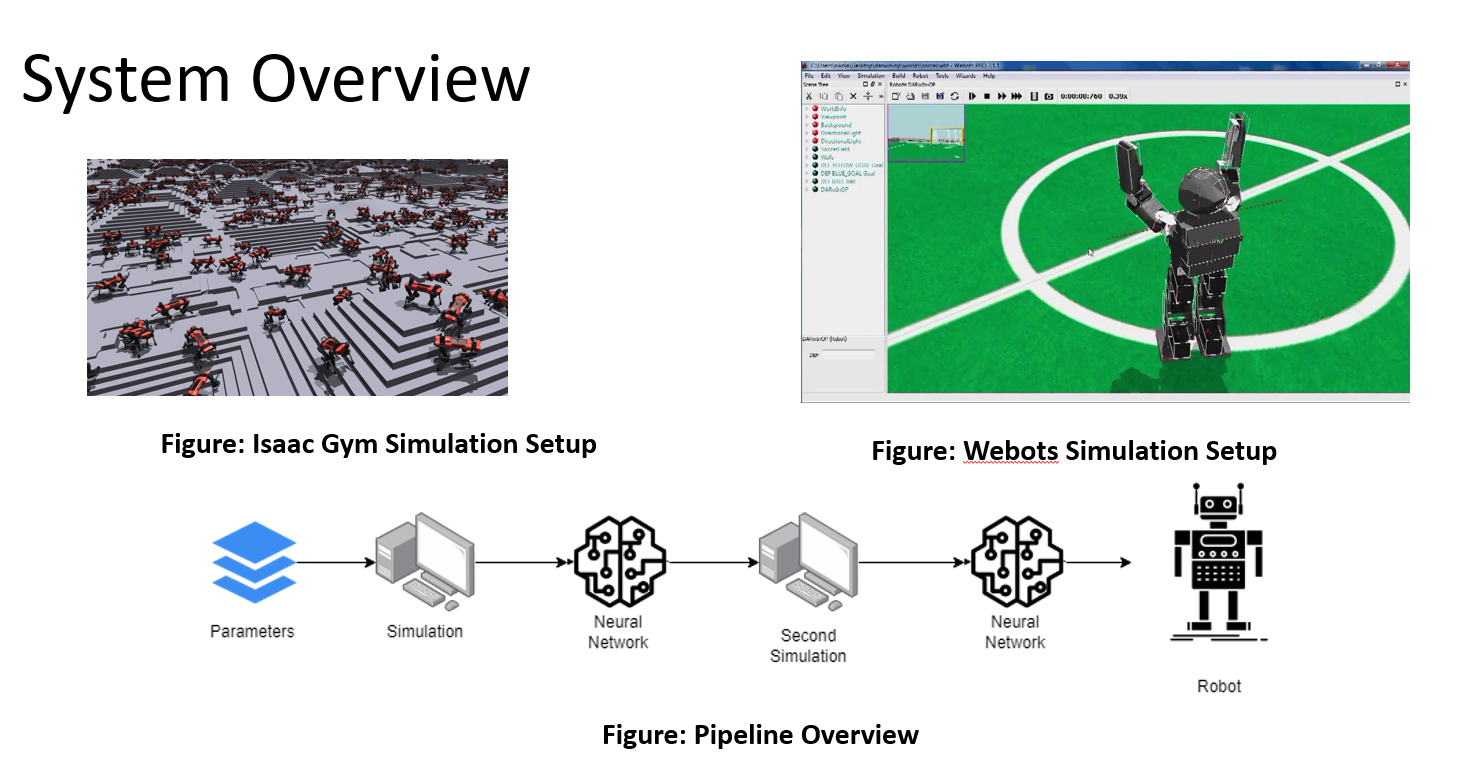
This thesis presents a new approach for training control-related tasks in humanoid robots to participate in the RoboCup Humanoid Soccer League. The proposed approach combines Deep Reinforcement Learning (RL) with the Proximal Policy Optimization (PPO) algorithm and Adversarial Motion Priors (AMP) technique to train a neural network in a simulated environment. The PPO algorithm is used to improve the stability and reduce programming effort, while the AMP technique allows the robot to imitate behavior from a reference motion dataset, increasing flexibility and reducing the need for complex reward functions. The trained model is fine-tuned and deployed in a real-world setting using domain randomization to address any discrepancies between the simulated environment and actual conditions. This research will enable a humanoid robot to react dynamically to the environment of a soccer match and make more complex decisions, including team play, and lays the foundation for future RL projects utilizing AMP to transfer complex skills to physical robots.
| Walking Task | Kicking Task | Jumping Task |
|---|---|---|
Video | Video | Video |
System Overview
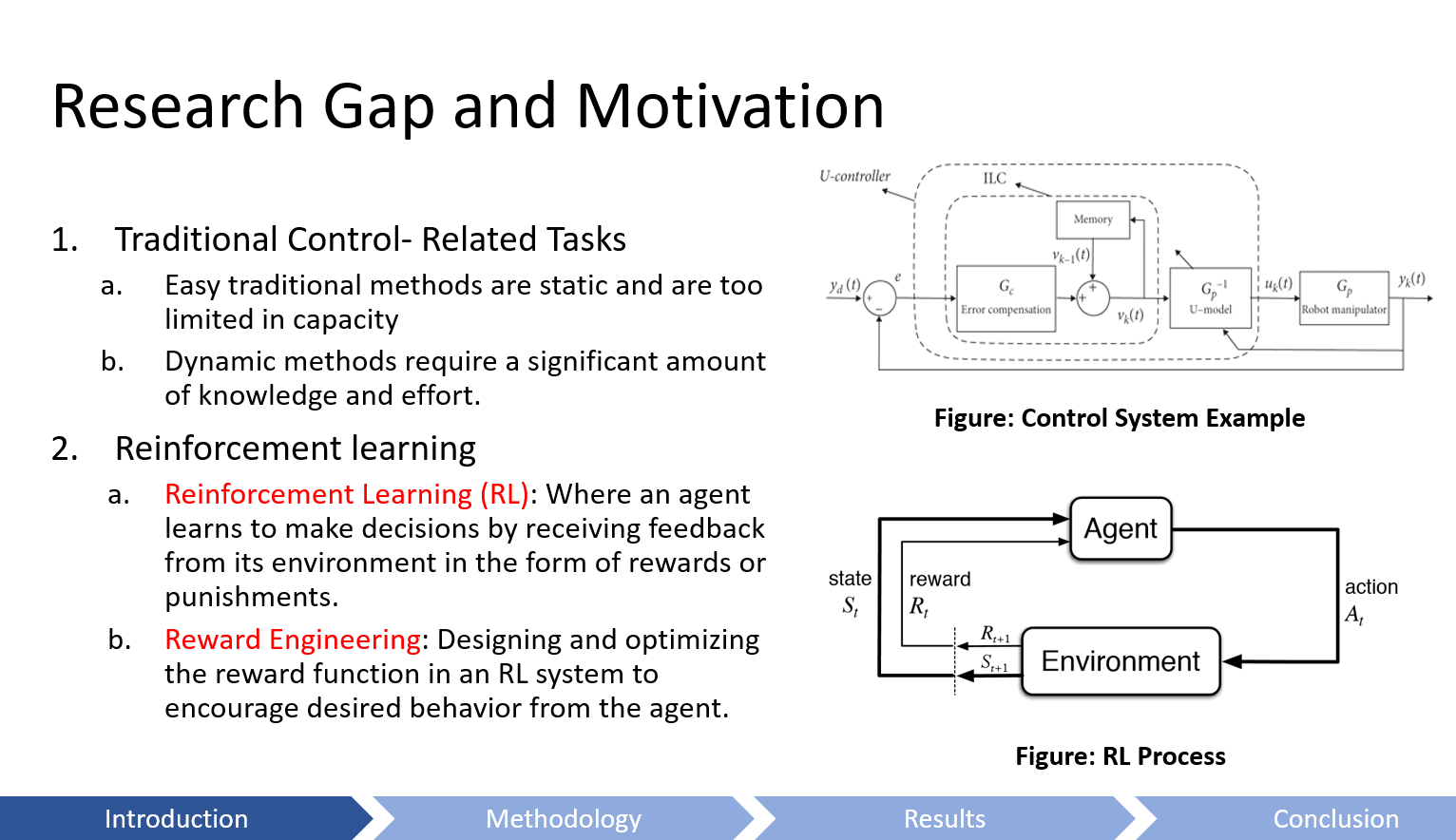
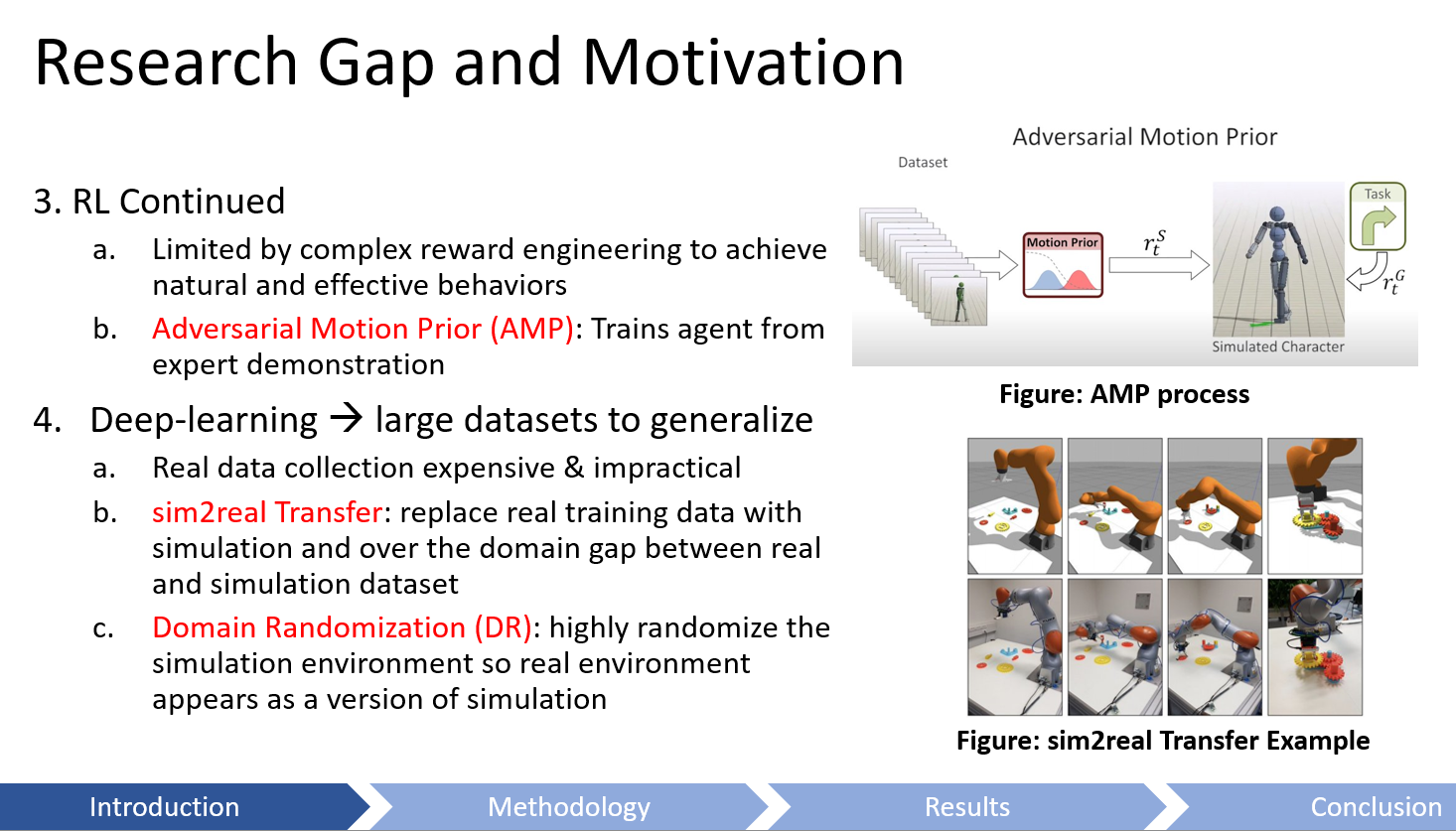
Research Gap & Motivation
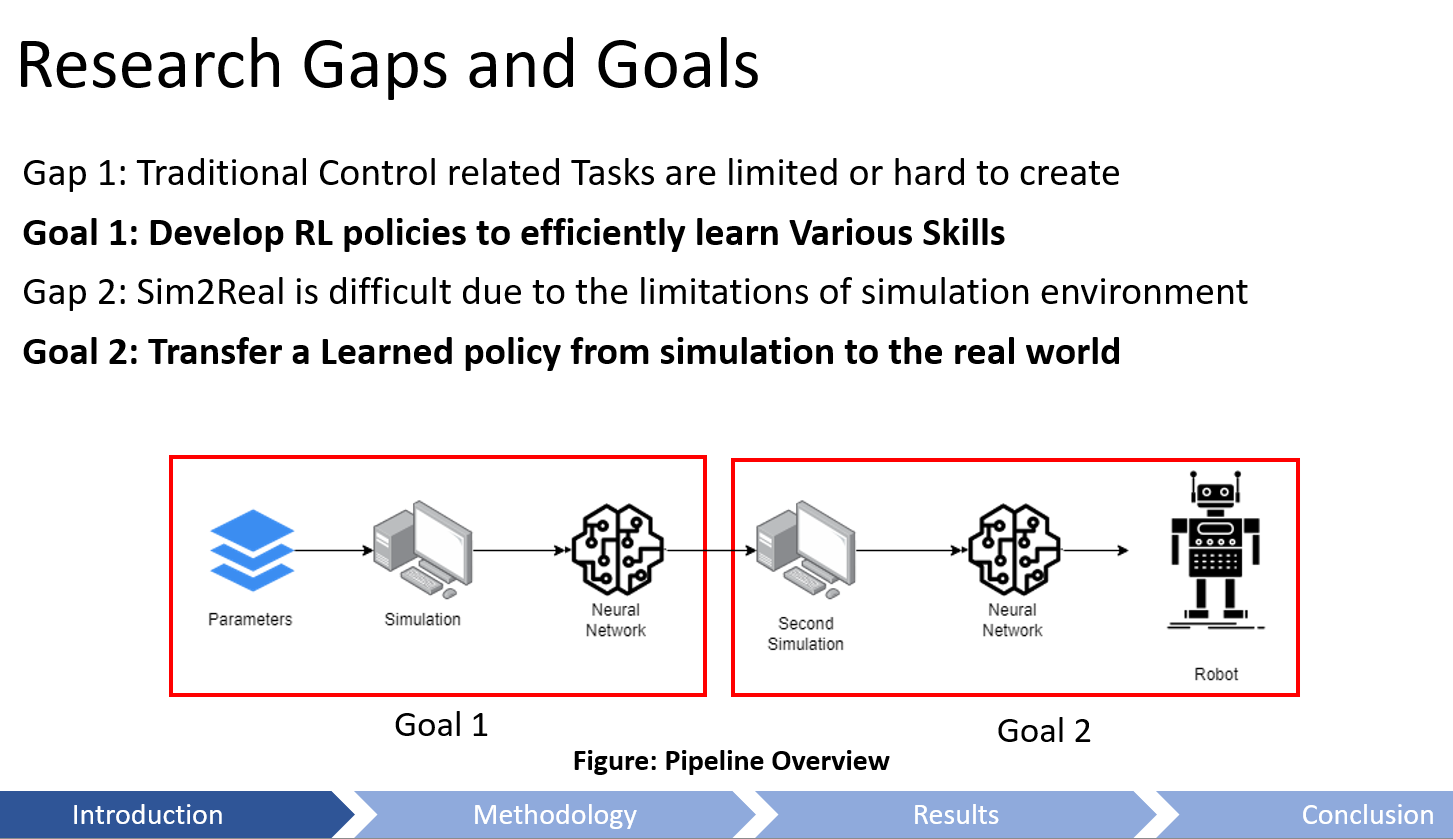
Research Goals
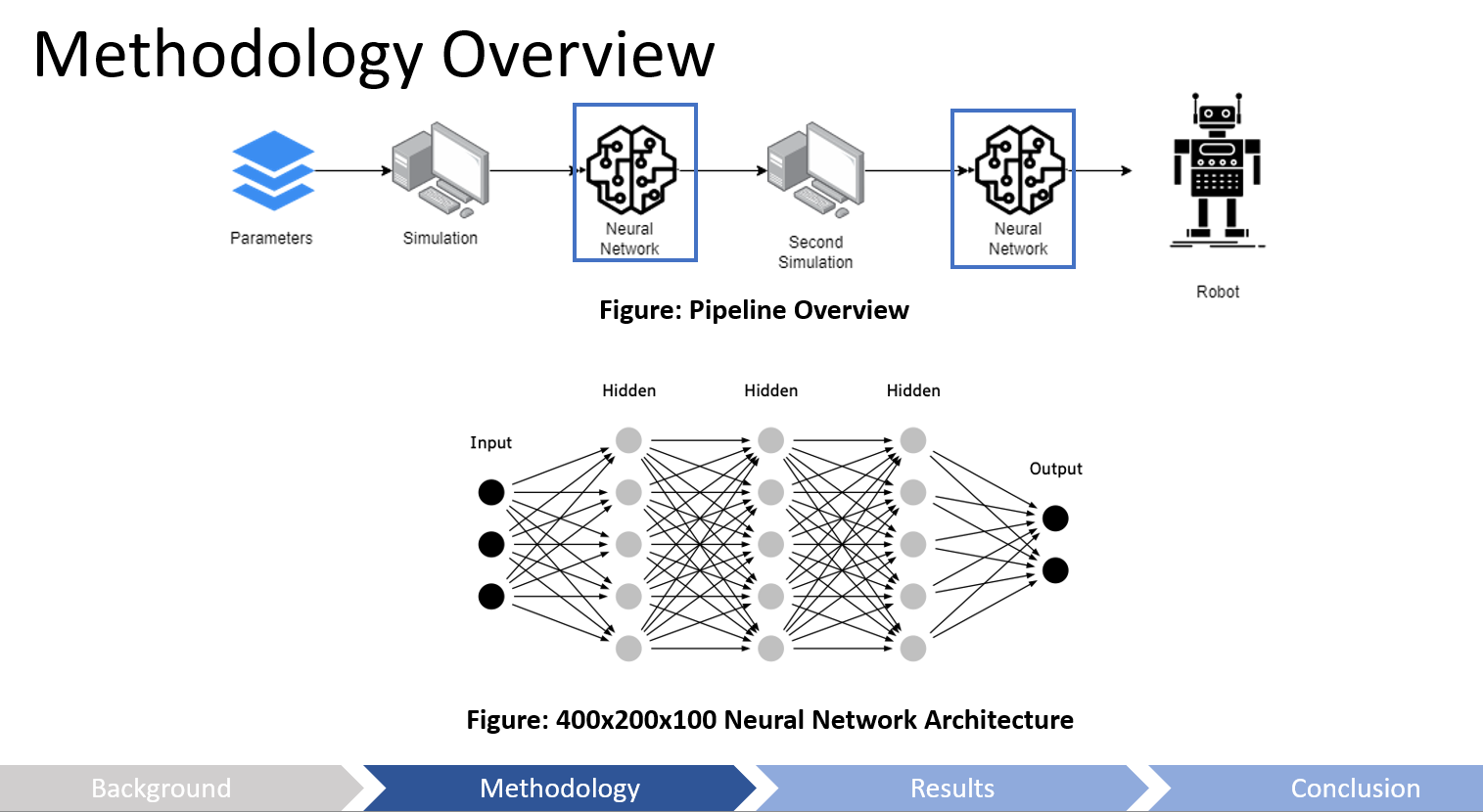
Methodology
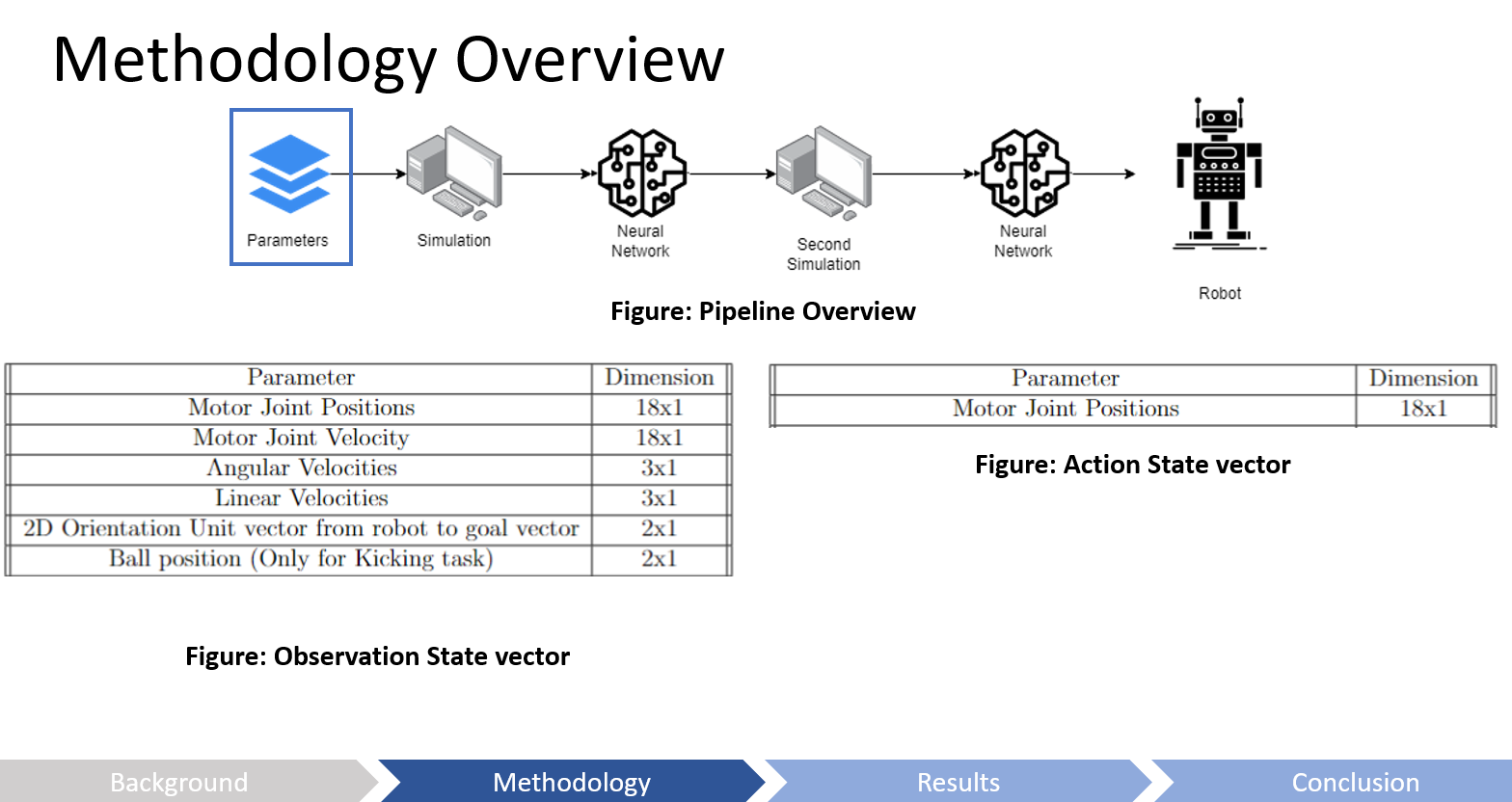
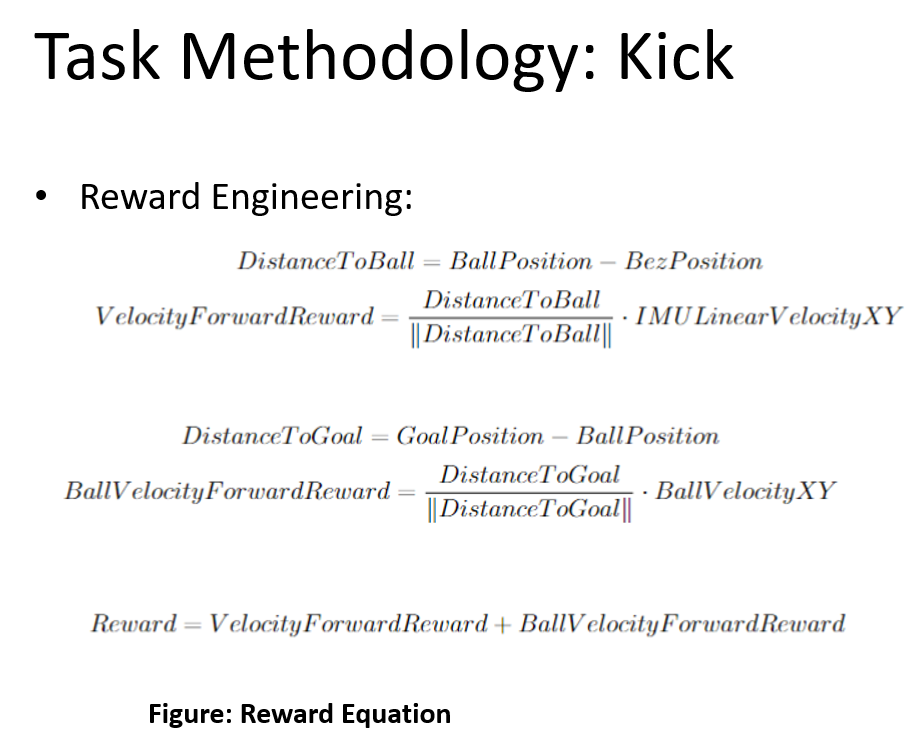
Methodology: Kick
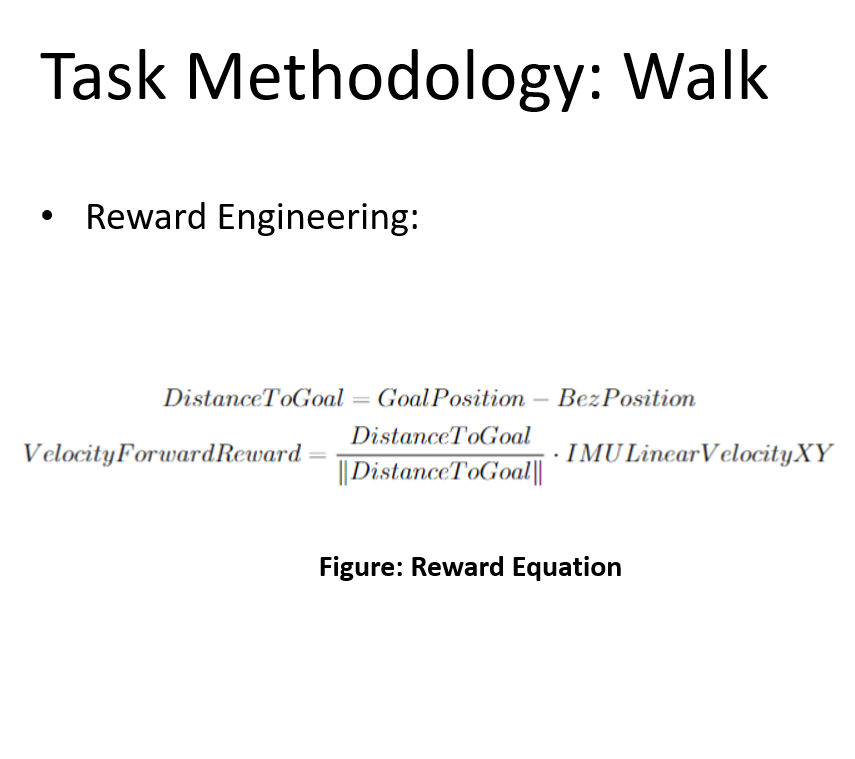
Methodology: Walk
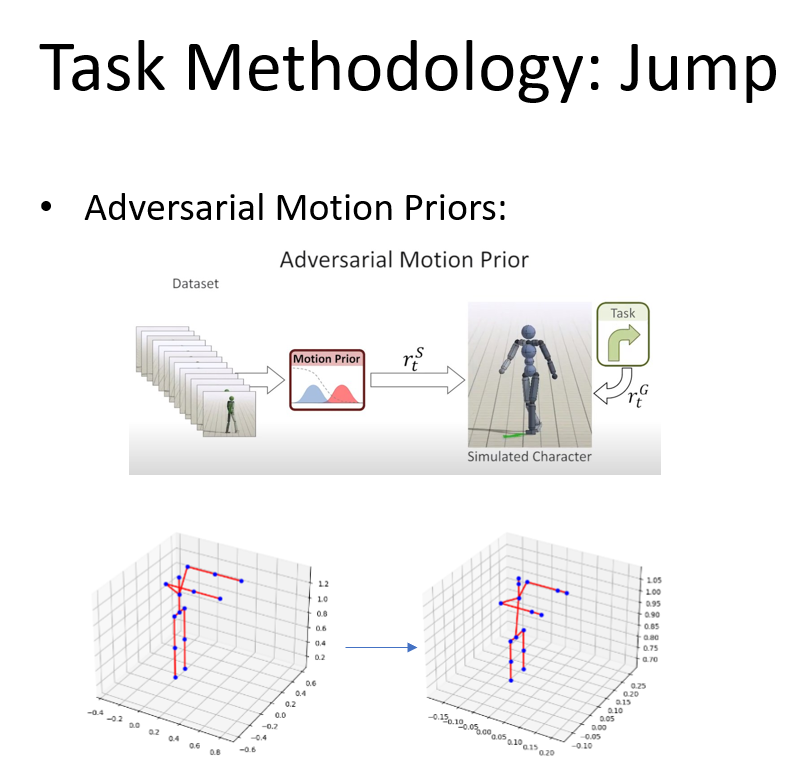
Methodology: Jump
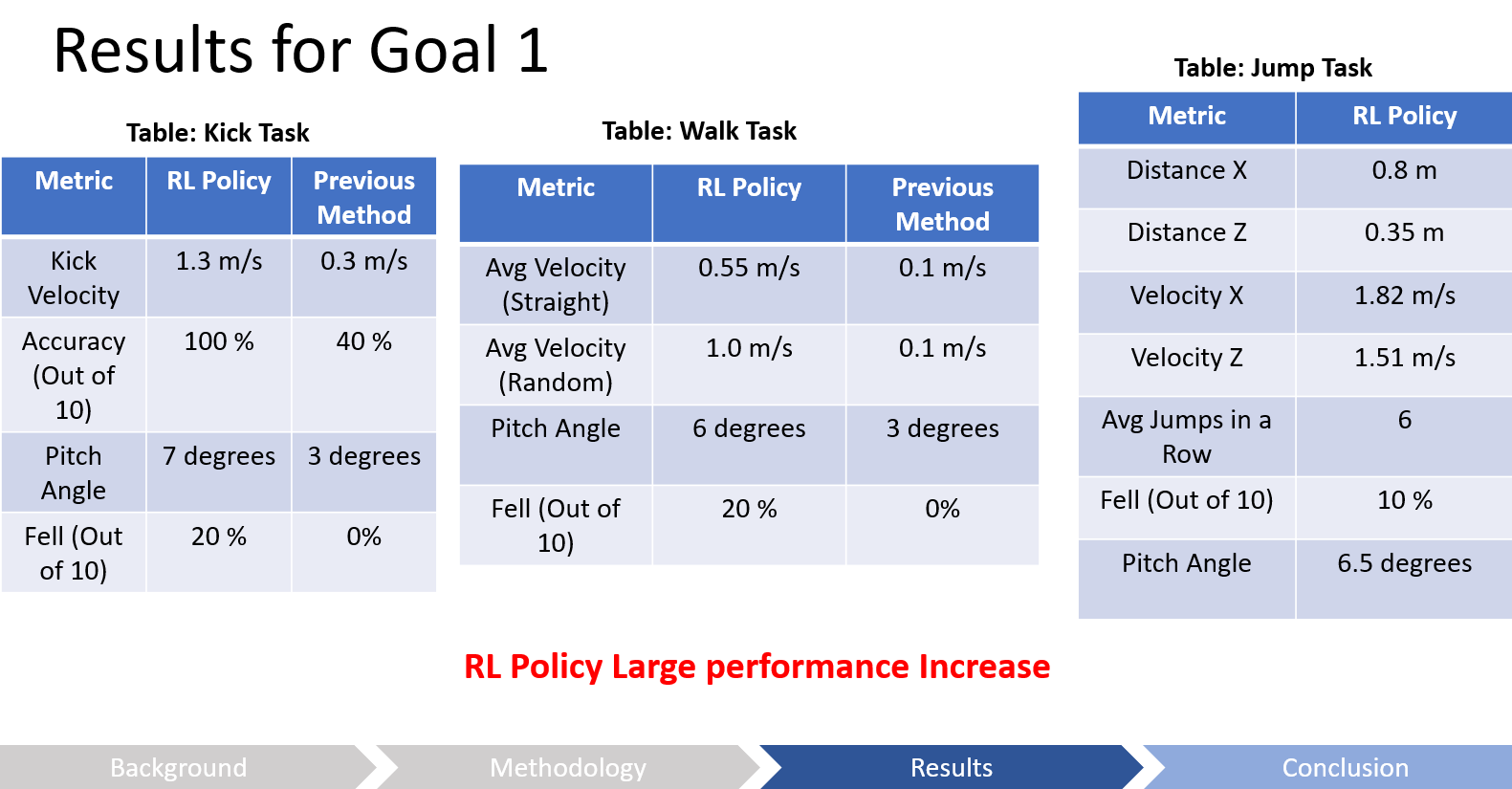
Results