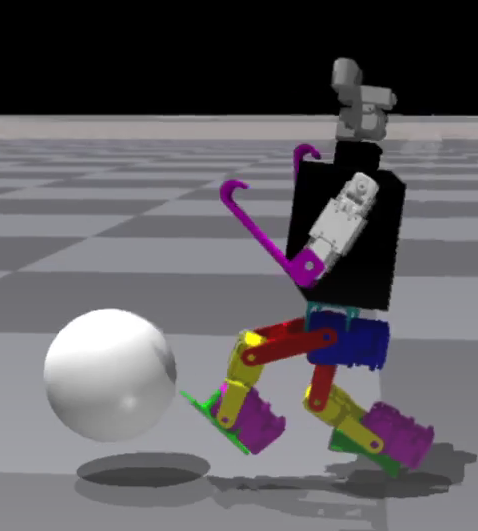
Reinforcement Learning for Soccer Skills Research Thesis (2022-2023)
Implemented reinforcement learning (RL) techniques including Proximal Policy Optimization (PPO) and Adversarial Imitation Learning to train humanoid robots in tasks such as walking, jumping, and kicking, resulting in improved stability, accuracy, and performance.